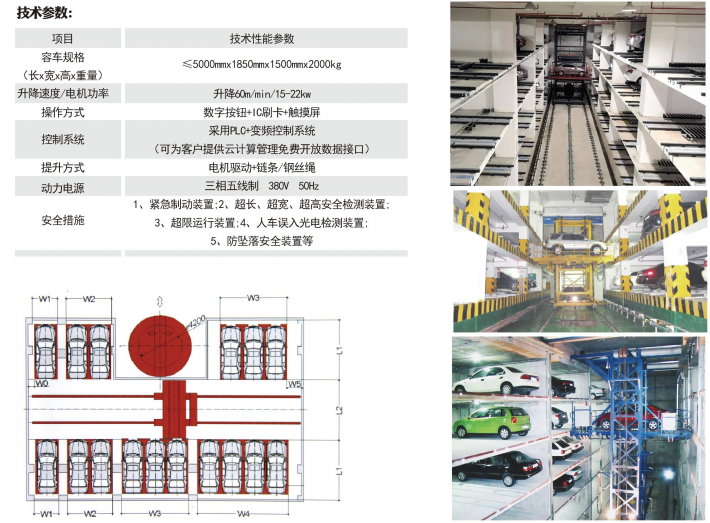
巷道堆垛类立体车库
工作原理:
在两侧泊位的中央设有巷道堆垛搬运机器人,整个车库的运行均由堆垛搬运机器人来完成。汽车入库时,停在出入库台上,堆垛搬运机器人从出入库台上取走汽车后在巷道内行走并提升,将汽车运送到指定层的泊位旁,堆垛搬运机器人上的存取机构将汽车从堆垛搬运机器人送入泊位;取车过程与进车过程相反。
产品特点:
升降和横移同时进行,提高出入库时间;
可充分利用地下空间,提供更多的停车位置;
全智能自动PLC控制,采取按钮、IC卡、触摸屏、APP等多种控制方式,操作简单。
项目简介: